Least Conservative Linearized Constraint Formulation for Real-Time Motion Generation
Abstract
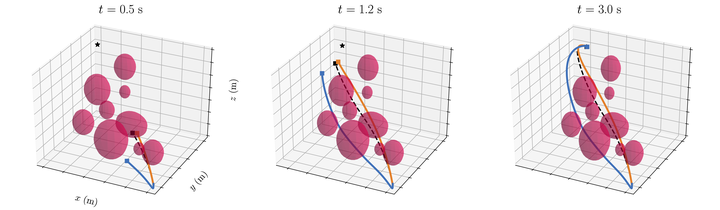
Today robotics has shown many successful strategies to solve several navigation problems. However, moving into a dynamic environment is still a challenging task. This paper presents a novel method for motion generation in dynamic environments based on real-time nonlinear model predictive control (NMPC). At the core of our approach is a least conservative linearized constraint formulation built upon the real-time iteration (RTI) scheme with Gauss-Newton Hessian approximation. We demonstrate that the proposed constraint formulation is less conservative for planners based on Newton-type method than for those based on a fully converged NMPC method. Additionally, we show the performance of our approach in simulation, in a scenario where the Crazyflie nanoquadcopter avoids balls and reaches its desired goal in spite of the uncertainty about when the balls will be thrown. The numerical results validate our theoretical findings and illustrate the computational efficiency of the proposed scheme.