Towards Safe Human-Quadrotor Interaction: Mixed-Initiative Control via Real-Time NMPC
Abstract
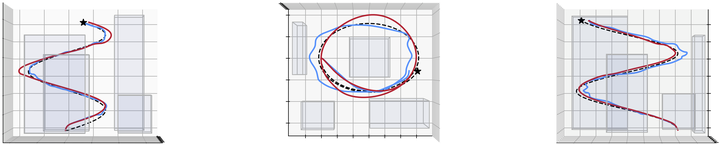
This paper presents a novel algorithm for blending human inputs and automatic controller commands, guaranteeing safety in mixed-initiative interactions between humans and quadrotors. The algorithm is based on nonlinear model predictive control (NMPC) and involves using the state solution to assess whether safety- and/or task-related rules are met to mix control authority. The mixing is attained through the convex combination of human and actual robot costs and is driven by a continuous function that measures the rules’ violation. To achieve real-time feasibility, we rely on an efficient real-time iteration (RTI) variant of a sequential quadratic programming (SQP) scheme to cast the mixed-initiative controller. We demonstrate the effectiveness of our algorithm through numerical simulations, where a second autonomous algorithm is used to emulate the behavior of pilots with different skill levels. Simulations show that our scheme provides suitable assistance to pilots, especially novices, in a workspace with obstacles while bolstering computational efficiency.