Pendubot
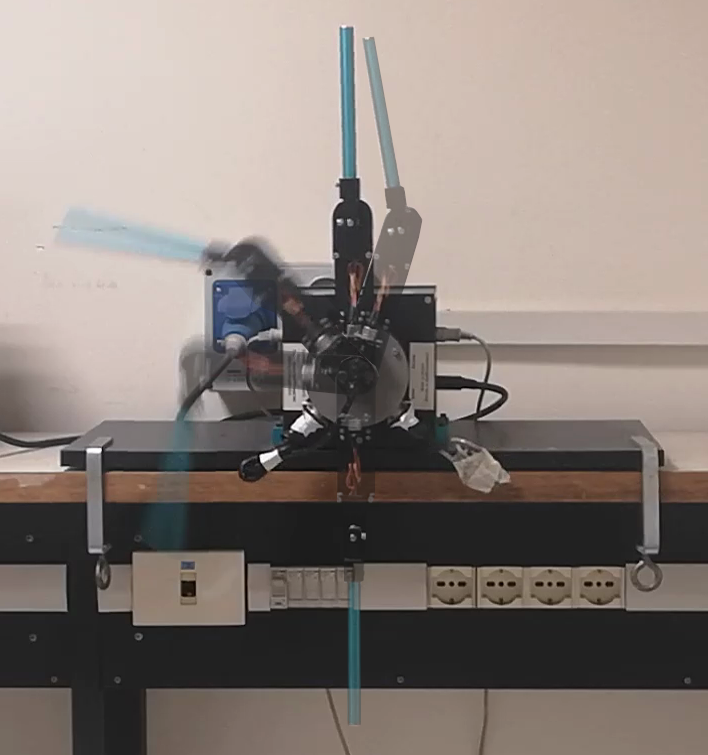 Photo by Giulio Turrisi
Photo by Giulio Turrisi
This was my first project working with real-time NMPC. Here, the NMPC was combined with a learned control policy to enforce safety in robotic systems. The algorithm was validated using the Pendubot, a challenging underactuated system, in a swing-up task.