Multi-UAV system
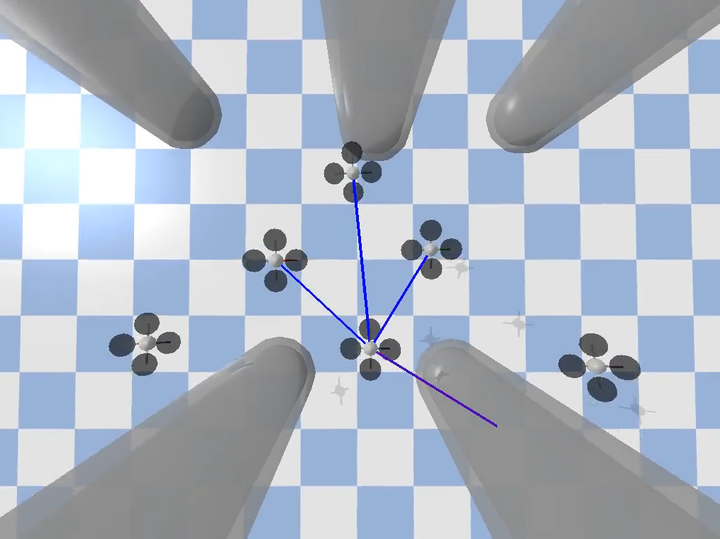
Real-time distributed NMPC for tracking and formation control of multi-UAV systems in forest-like environments.
Real-time distributed NMPC for tracking and formation control of multi-UAV systems in forest-like environments.